گیتی الکترونیک مبتکر ایرانیان (گاما)
طراحی و ساخت انواع پروژه های الکترونیکی صنعتی و دانشجویی 09137291125گیتی الکترونیک مبتکر ایرانیان (گاما)
طراحی و ساخت انواع پروژه های الکترونیکی صنعتی و دانشجویی 09137291125پیوندها
- افزایش بازدید وبلاگ افزایش بازدید
- ایران بازدید افزایش بازدید سایت و وبلاگ
- افزایش بازدید رایگان سایت بهترین سامانه افزایش بازدید
- لینکدونی آی پی رنک افزایش بازدید|بهبود رتبه الکسا|بک لینک رایگان
- خرید هاست لینوکس
دستهها
ابر برجسب
میکرو avr ساخت پروژه الکترونیک گیتی الکترونیک میکروکنترلر شرکت گیتی الکترونیک مبتکر BMS پروژه دانشجویی آموزش avr آموزش میکرو ساخت پروژه دانشجویی آموزش از مبتدی تا پیشرفته پروژه ارزان آموزش تصویری میکرو ساخت پروژه میکروجدیدترین یادداشتها
همه- طراحی بردهای الکترونیکی (گیرنده 10 کانال)
- اطلاعیه
- پروژه شبیه ساز BMS ساختمان (تمرین برنامه نویسی)
- پروگرم کردن یک میکرو با یه میکروی دیگه بصورت اپن سورس!
- پروژه BMS از طریق وایفای و اینترنت و ریموت های کدفیکس و کدلرن
- کنترلر دما با ماشین حساب و ال سی دی گرافیکی و تاچ
- مدار فلاشر و تایمر با 555
- نمایش عکس و راه اندازی تاچ با میکرو کنترلر lpc1768
- کنترل کننده وسایل برقی توسط ماژول nrf24L01+
- پروژه دربازکن از طریق خط تلفن
نویسندگان
- وحید عابدی 20
- حسن محمدزاده 41
بایگانی
- مهر 1403 1
- دی 1401 1
- اردیبهشت 1399 1
- اسفند 1398 1
- آبان 1398 1
- اسفند 1397 1
- دی 1397 1
- آذر 1397 2
- مهر 1397 1
- شهریور 1397 2
- بهمن 1396 1
- بهمن 1395 2
- دی 1394 5
- آذر 1394 12
- آبان 1394 2
- مهر 1394 4
- شهریور 1394 1
- مرداد 1394 9
- تیر 1394 5
- خرداد 1394 2
- اردیبهشت 1394 1
- فروردین 1394 3
- اسفند 1393 2
جستجو
پروژه ساخت ربات کنترل شونده با استفاده از بلوتوث و USB کامپیوتر
توضیح : در این پروژه با استفاده از بلوتوث و همچنین از طریق USB کامپیوتر میتوانید برای ربات موردنظر فرمان های حرکتی صادر نموده و ربات را در جهات مختلف به حرکت در آورید...
قسمت کنترل با USB کامپیوتر :
در این پست فقط کلیپ مربوط به کنترل از طریق بلوتوث را قرار داده ایم و کلیپ کنترل از طریق USB در پروژه های قبل ارائه گردیده است و از طریق لینک زیر میتوانید آنرا دانلود نمائید...
![]()
قسمت کنترل با بلوتوث :
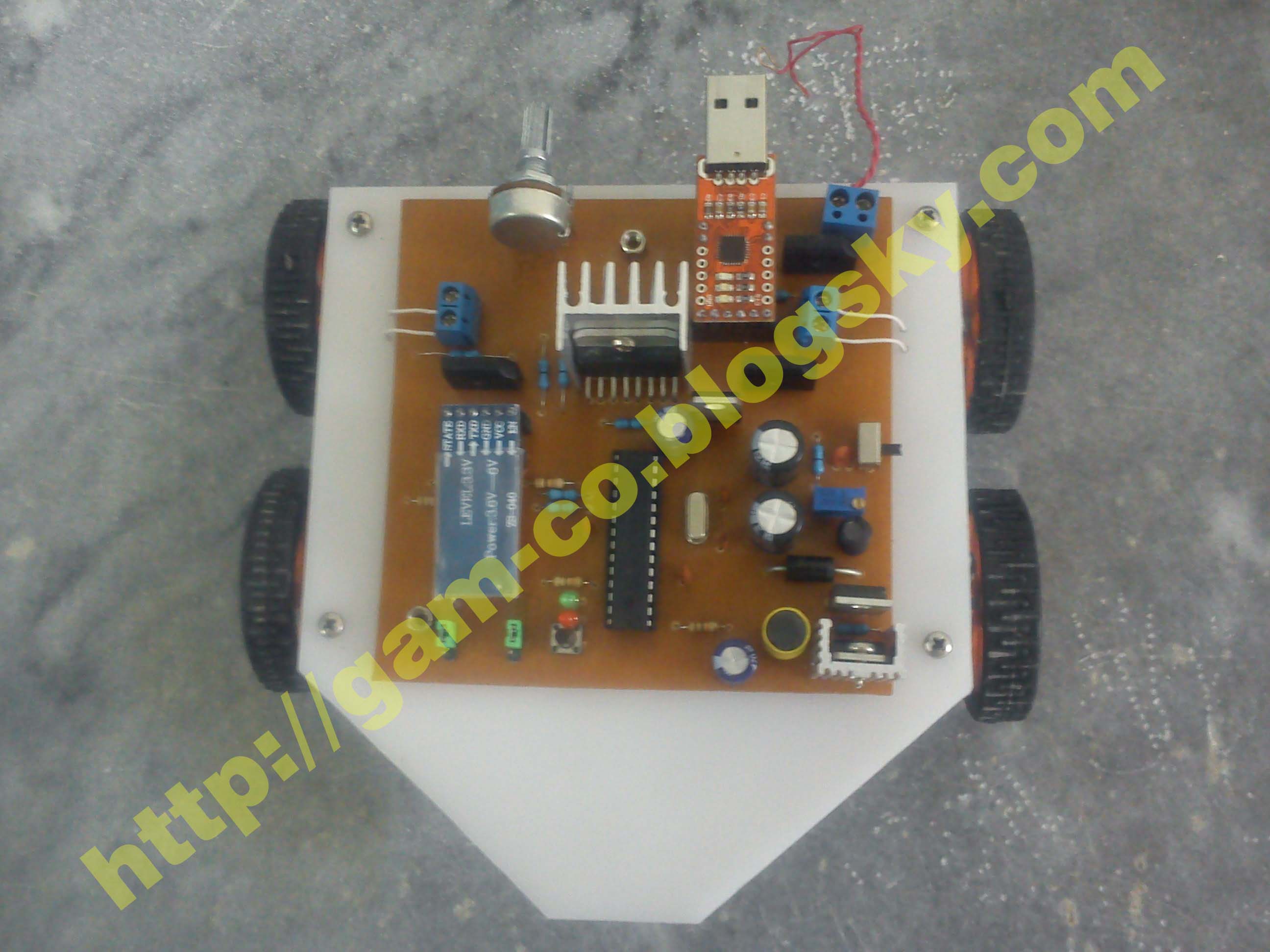


لطفا جهت کسب اطلاعات بیشتر در مورد پروژه با شماره های درج شده در قسمت ارتباط با ما تماس حاصل نمائید...
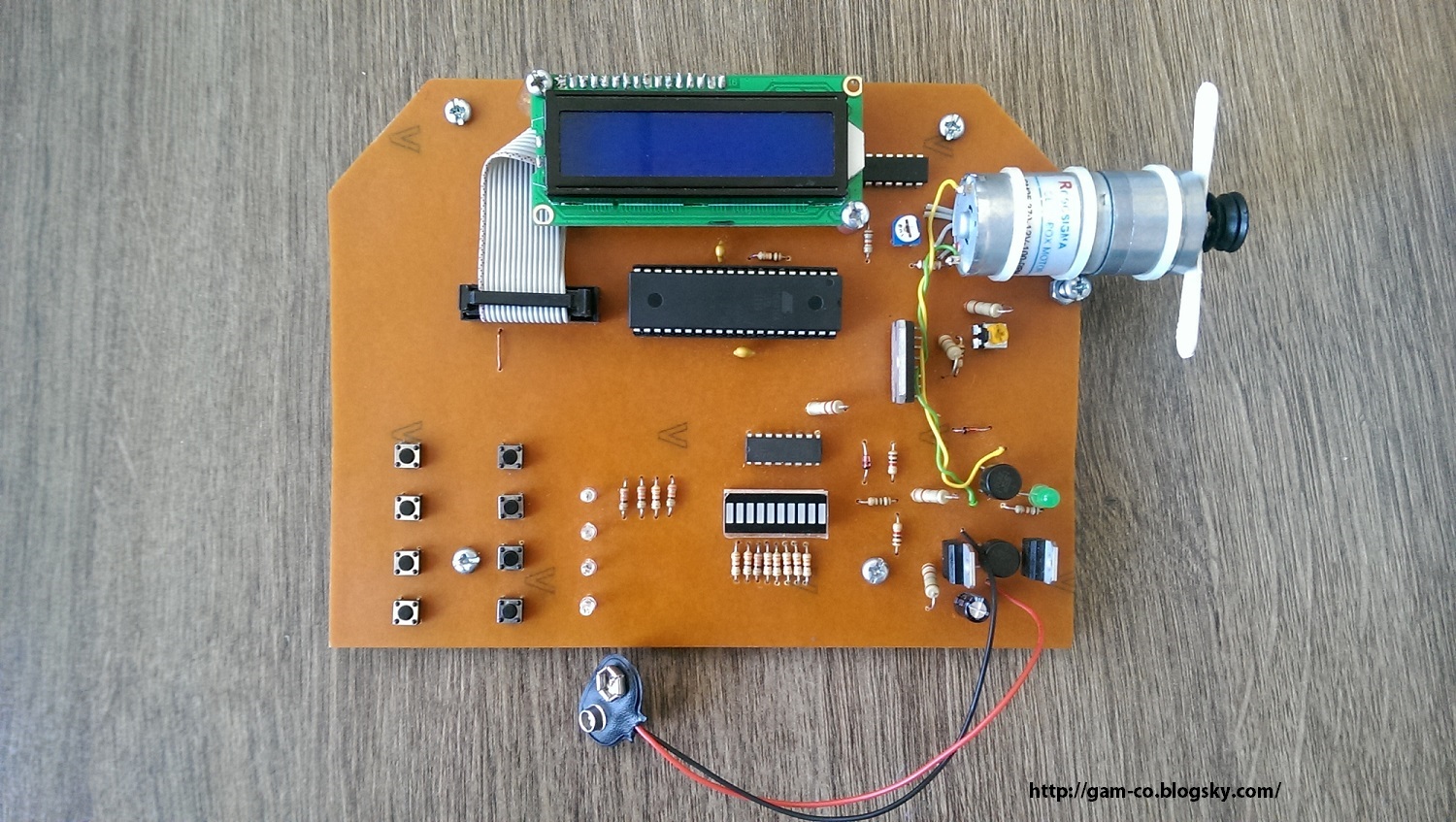
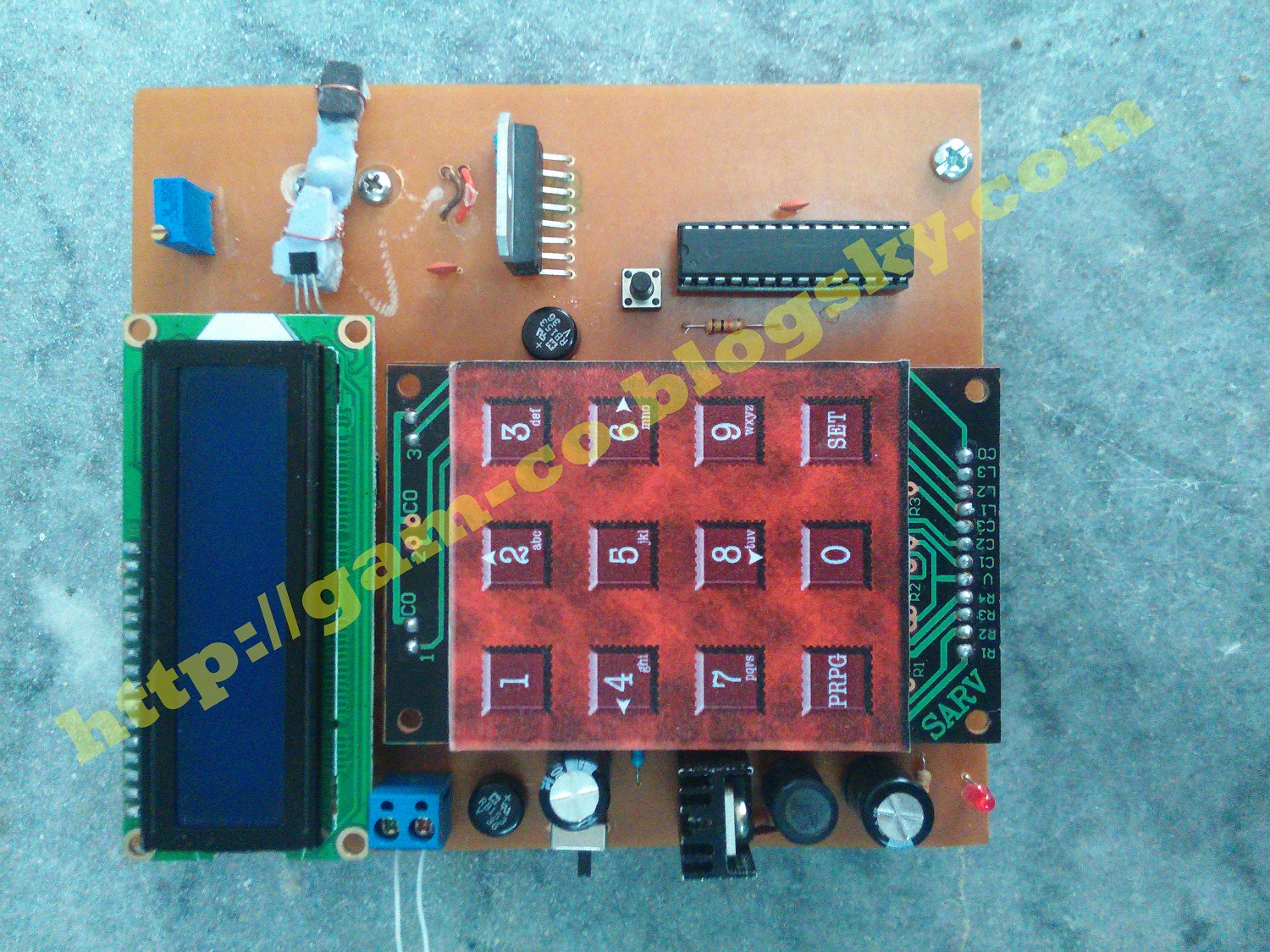
پروژه ساخت مدار دورسنج فیدبک دار با سنسور اثر هال
توضیح :
در این پروژه با استفاده از کیپد سرعتی را برای موتور انتخاب نموده و مدت زمانی طول میکشد که موتور به سرعت مشخص شده برسد و در آن سرعت ثابت گردد.
همچنین میزان سرعت ورودی باید بین 2000 تا 4500 rpm باشد و هر عددی را خارج از این بازه بزنیم سیستم فرمان میدهد که این عدد باید در بازه فوق باشد...
توضیحات تکمیلی را میتوانید با مشاهده کلیپ مربوطه دریابید.

پروژه ساخت مدار شبیه ساز آسانسور
1- دارای سنسور وزن : در صورت داشتن وزن غیر مجاز آسانسور حرکت نخواهد کرد
2- دارای قسمت Hand Mode : که با آن میتوان بین طبقات به صورت دستی جا به جا شد.
3- دارای پسورد جهت ورود به قسمت Hand Mode
4- دارای Tacho meter (سرعت سنج) در قسمت Hand Mode
5- دارای نشانگر درصد شارژ باتری
6- دارای قابلیت انتخاب همزمان چند طبقه
...